
如何做到火箭发射时的垂直控制?
如何让导弹飞行中实现姿态控制?
如何让人形机器人(humanoid)在行走时达成平衡控制?
... ...
这样的控制技术似乎距离我们很遥远,但其实它就渗透在生产、生活的各个角落。而控制理论研究的核心模型就是倒立摆系统(Inverted Pendulum System, IPS)——一个典型的复杂、不稳定、非线性、多输入多输出(MIMO)系统。
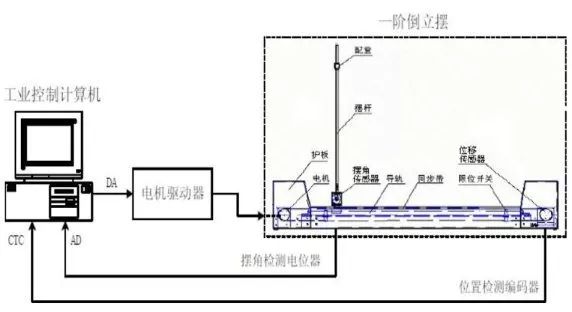
通过对倒立摆系统的控制可以检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。同时倒立摆模型在军工、航空航天、机器人领域都有广泛应用。


是不是对控制系统的内在算法和结构搭建充满了好奇?8月22日,我们便会邀请一位资深00后创客,也是之前智能语音分类垃圾桶的原型创作者林士淇为大家发起倒立摆结构与其背后的PID控制算法应用与发展主题分享会。
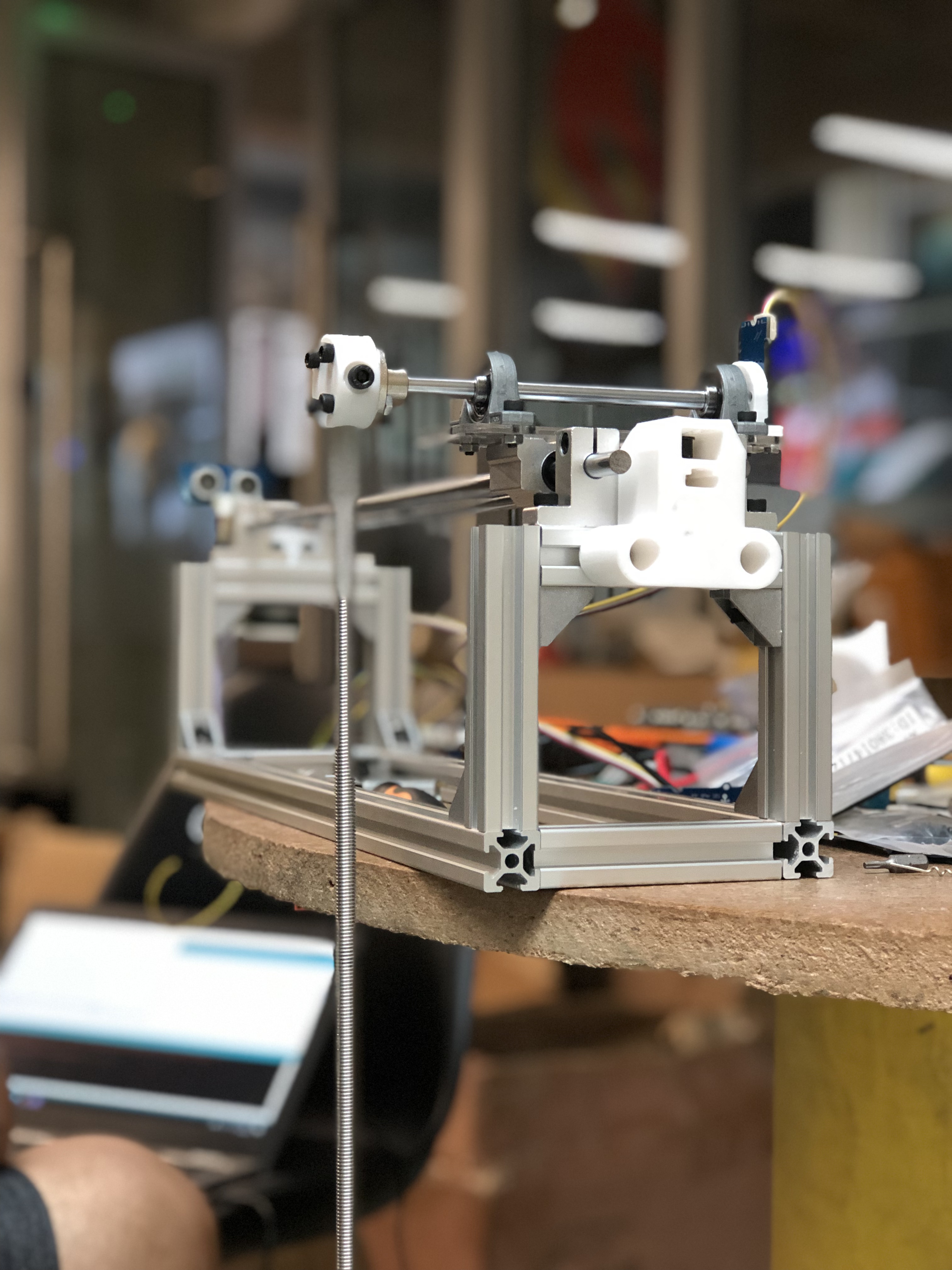
林士淇打造的倒立摆模型
届时,除了分享倒立摆的结构及其应用,士淇将与大家一起深入探索倒立摆背后的PID控制算法及其各大应用场景。

分享者:林士淇
一名资深的00后创客,
广工网络工程专业大三学生。
2014年入坑动手做东西,热爱机器人开发。
智能语音交互垃圾桶主创。
学业之余,已多次承接科技创新相关的商业项目。
活动详情
时间:8月22日(周三)19:30开始
地点:深圳南山区打石二路万科云设计公社B608柴火创客空间
名额:限20位
费用:免费
----END----
Chaihuo x.factory|深圳,东莞,河北